Parallel Robots with
Mixed Freedoms
Parallel Robots with
Mixed Freedoms

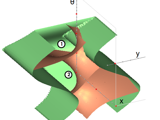
This proposal is a continuation of our late MEC?s project DPI 2005-02207, titled ?Design, synthesis and verification of parallel manipulators for industrial production. The case of lower mobility platforms?. There, lower mobility (less than six degrees of freedom) manipulators with uncoupled freedoms, i.e. simple and invariant motions (translational, spherical, and SCARA), were analysed. Now, in this project, lower mobility manipulators with mixed freedoms will be treated. This latter characteristic means that translation and rotation are coupled so that complex screw motions are generated. The last feature is very relevant and influences the project?s objectives.
Analysis, synthesis and design of these manipulators are complex matters. They require the development of a new theoretical approach, the use of specific mathematical tools such as Screw Theory and Group Theory, and the implementation of software for computational kinematics. Nonetheless, manipulators with mixed freedoms offer important returns. In particular, they reach higher velocities, have a wider workspace, and cover a variety of motions that are not obtainable in manipulators with uncoupled freedoms. Hence, they have an elevated potential for tasks where a continuous orientation of a tool is required, with an extensive range and dexterity.
Regardless of the primarily theoretical nature of some of the project?s objectives, their application in Robotics will be sought. Therefore, first, a procedure for the analysis of the forty six types of spatial motions will be stated, covering a complete characterization that goes from mobility to screw systems. Second, this procedure will be used to determine the motion requirements needed for the type synthesis. Third, a method for type synthesis, which solves the intersection of types of motion and some issues about finite displacements, will be proposed. Fourth, existing multi-objective optimization methods will be reviewed and the most appropriate will be adapted to the dimensional synthesis of this kind of manipulators. Finally, Lagragian Dynamics will be used to carry out the dynamic analysis using Lagrange multipliers.
All these results will be applied to manipulators with capability to perform two rotations and three translations. They will become either machines for laser material deposition or surgical robots for laparoscopy.
Parallel Robots with Mixed Freedoms.
lunes 15 de febrero de 2010