
Name of the project: Parallel Robots with Mixed Freedoms
Reference: DPI2008-00159
Funding: Ministerio de Ciencia e Innovación
Period: 2008 – 2010
This project DPI 2008-00159 is a continuation of our late MEC’s project DPI 2005-02207, titled “Design, synthesis and verification of parallel manipulators for industrial production. The case of lower mobility platforms”. There, lower mobility (less than six degrees of freedom) manipulators with uncoupled freedoms, i.e. simple and invariant motions (translational, spherical, and SCARA), were analysed. Now, in this project, lower mobility manipulators with mixed freedoms have been treated. This latter characteristic means that translation and rotation are coupled so that complex screw motions are generated. The last feature is very relevant and influences the project’s objectives.
 Analysis, synthesis and design of these manipulators are complex matters. They require the development of a new theoretical approach, the use of specific mathematical tools such as Screw Theory and Group Theory, and the implementation of software for computational kinematics. Nonetheless, manipulators with mixed freedoms offer important returns. In particular, they reach higher velocities, have a wider workspace, and cover a variety of motions that are not obtainable in manipulators with uncoupled freedoms. Hence, they have an elevated potential for tasks where a continuous orientation of a tool is required, with an extensive range and dexterity.
Analysis, synthesis and design of these manipulators are complex matters. They require the development of a new theoretical approach, the use of specific mathematical tools such as Screw Theory and Group Theory, and the implementation of software for computational kinematics. Nonetheless, manipulators with mixed freedoms offer important returns. In particular, they reach higher velocities, have a wider workspace, and cover a variety of motions that are not obtainable in manipulators with uncoupled freedoms. Hence, they have an elevated potential for tasks where a continuous orientation of a tool is required, with an extensive range and dexterity.
Regardless of the primarily theoretical nature of some of the project’s objectives, their application in Robotics has been sought. Therefore, first, a procedure for the analysis of the forty six types of spatial motions has been stated, covering a complete characterization that goes from mobility to screw systems. Second, this procedure is used to determine the motion requirements needed for the type synthesis. Third, a method for type synthesis, which solves the intersection of types of motion and some issues about finite displacements, has been proposed. Fourth, existing multi-objective optimization methods have been reviewed and the most appropriate has been adapted to the dimensional synthesis of this kind of manipulators. Finally, Lagragian Dynamics has been used to carry out the dynamic analysis using Lagrange multipliers.
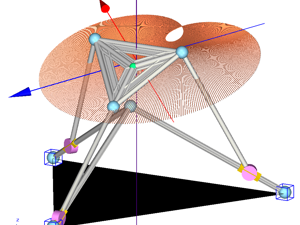
All these results have been applied to manipulators with capability to perform two rotations and translations. An example has been developed on the basis of a Solar Tracker. A four DoFs parallel manipulator has been designed that has two rotational and two translational freedoms.
In the following there is a compilation of the papers published with regards to this project:
- Hernández, A.; Altuzarra, O.; Pinto, Ch.; Amezua, E.; “Transitions in the velocity pattern of lower mobility parallel manipulators”. Mechanism and Machine Theory, vol. 43(6), pp: 738-753, 2008.
- Avilés, R.; Hernández, A.; Amezua, E.; Altuzarra, O. “Kinematic Analysis of Linkages Based in Finite Elements and the Geometric Stiffness Matrix”. Mechanism and Machine Theory Vol:43, pp:964-983, 2008.
- Altuzarra, O.; Salgado, O.; Petuya, V.; Hernández A. “Computational Kinematics for Parallel Manipulators: Jacobian Problems” Engineering Computations, Vol. 25, pp: 4-27. 2008.
- Petuya, V.; Alonso, A.; Pinto, Ch.; Altuzarra, O.; Hernández A. “A new general-purpose method to solve the forward position problem in parallel manipulators” Advanced Robotics. Vol: 22, pp: 395-409. 2008.
- Petuya, V.; Gutierrez, J. M.; Alonso, A.; Altuzarra, O.; Hernández, A.; “A Numerical Procedure to Solve Non-Linear Kinematic Problems in Spatial Mechanisms”. International Journal for Numerical Methods in Engineering. Vol: 73, pp: 825-843. 2008.
- Salgado, O.; Altuzarra, O.; Petuya, V.; Hernández, A.; “Synthesis and Design of a Novel 3T1R Fully-Parallel Manipulator”. Journal of Mechanical Design. Vol: 130, pp: 042305-1-8. 2008
- Macho, E.; Altuzarra, O.; Pinto, Ch.; Hernandez, A.; “Workspaces associated to assembly modes. Application to the path planning of the 5R planar manipulator”. Robotica, vol. 26, Issue 3, 2008.
- Altuzarra, O.; Salgado, O.; Hernández, A.; Angeles, J. Multiobjective Optimum Design of a Symmetric Parallel Schönflies-Motion Generator. Journal of Mechanical Design, vol 131, pp: 031002-1-11 2009.
- Altuzarra, O.; San Martín, Y.; Amezua, E.; Hernández, A.; “Motion Pattern Analysis of Parallel Kinematic Machines: A Case Study”. Robotics and Computer-Integrated Manufacturing, vol 25, pp: 432-440. 2009.
- Altuzarra, O.; Loizaga, M.; Pinto, Ch.; Petuya, V.; “Synthesis of Partially Decoupled Multi-level Manipulators with Lower Mobility”. Mechanism and Machine Theory, vol 45, pp: 106-118. 2009.
- Altuzarra, O.; Zubizarreta, A.; Cabanes, I.; Pinto, Ch.; “Dynamics of parallelogram-limbed Parallel Manipulators”. Mechatronics, vol 19, pp:1269-1279. 2009.
- Macho, E.; Altuzarra, O.; Amezua, E.; Hernández, A.; “Obtaining Configuration Space and Singularity Maps for Parallel Manipulators”. Mechanism and Machine Theory, vol. 44, pp: 2110-2125. 2009.
- Zubizarreta, A.; Cabanes, I.; Marcos, M.; Pinto, Ch.; “Dynamic modelling of planar parallel robots considering passive joint sensor data”. Robotica, Vol: 28, pp: 649-661. 2009.
- Pinto, Ch.; Corral, J.; Altuzarra, O.; Hernández, A.; “A methodology for static stiffness mapping in lower mobility parallel manipulators with decoupled motions”. Robotica, vol. 28, pp: 719-735. 2010.
- Salgado, O.; Altuzarra, O.; Viadero, F.; Hernández, A.; “Computational kinematics for robotic manipulators: instantaneous motion pattern”. Engineering Computations, vol. 27, pp: 495-518. 2010.
- Urizar, M.; Petuya, V.; Altuzarra, O.; Macho, E.; Hernández, A.; “Computing the configuration space for tracing paths between assembly modes”. ASME Journal of Mechanisms and Robotics, vol. 2, pp: 031002-1-12. 2010.
- Hernandez, A.; Altuzarra, O.; Petuya, V.; Macho, E.; “Defining conditions for non-singular transitions of assembly modes”. IEEE Transactions on Robotics, vol 25, pp:1438-1447. 2010.
- Altuzarra, O.; Petuya, V.; Urízar, M.; Hernández, A.; “Design procedure for cuspidal parallel manipulators”. Mechanism and Machine Theory, vol. 46, pp.: 97-111, 2011.
- Altuzarra, O.; Pinto, Ch.; Sandru, B.; Hernández, A.; “Computational Dimensioning for Parallel Manipulators: Workspace, Dexterity and Energy”. Journal of Mechanical Design, vol. 133 (4) (041007 – 7 pages)), 2011.
- Macho, E.; Pinto, Ch.; Amezua, E.; Hernández A. “Software Tool to Compute, Analyze and Visualize Workspaces of Parallel Kinematics Robots”, Advanced Robotics. Vol. 25. 675-698, 2011.
- Altuzarra, O.; Aginaga, J.; Hernández, A; Zabalza, I.; “Workspace analysis of positioning discontinuities due to clearances in parallel manipulators”, Mechanism and Machine Theory, 2011. Vol. 46 (5) Pages 577–592.
- Petuya, V.; Macho, E.; Altuzarra, O.; Pinto, C.; Hernández, A. “Educational Software Tools for the Kinematic Analysis of Mechanisms”, Comp. Appl. Eng. Education. DOI: 10.1002/cae.20532 – 15 pages, 2011.
- Altuzarra, O.; Sandru, B.; Pinto, Ch.; Petuya, V.; “A symmetric parallel Schönflies motion manipulator for pick and place operations”. Robotica, vol. 29, 853-862, 2011.
- O. Altuzarra, C. Pinto, B. Sandru and A. Hernández. Optimal Dimensioning for Parallel Manipulators: Workspace, Dexterity and Energy. Revista: ASME. Journal of Mechanical Design. MD-10-1086. Vol. 133, 2011.
- A. Zubizarreta, M. Marcos, I. Cabanes, Ch. Pinto (2011). A procedure to evaluate Extended Computed Torque Control configurations in the Stewart-Gough Platform. Robotics and Autonomous System. doi: 10.1016/j.robot.2011.05.012. ISSN: 0921-8890. Elsevier 2011.
- Mikel Diez, Víctor Petuya, Luis Alfonso Martínez-Cruz, Alfonso Hernández. A biokinematic approach for the computational simulation of proteins molecular mechanism. Mechanism and Machine Theory 46 (2011) 1854–1868. DOI: 10.1016/j.mechmachtheory.2011.07.013