
Name of the prototype: 3PRS
Belonging to the project: DYNAMECH
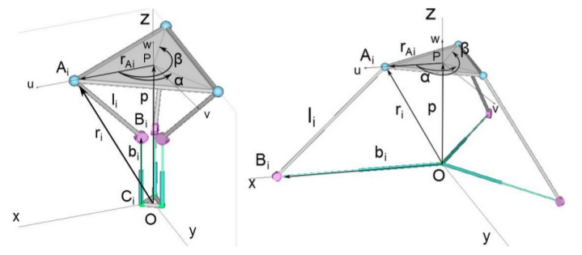
The 3PRS consists of a mobile and a fixed platform joined by three identical limbs. The joints of each limb are – starting from the fixed platform – an actuated prismatic joint, a revolute joint and a spherical joint.
It has 3 degrees of freedom – 2 rotations about the X- and Y- axes and 1 translation about the Z-axis. Thus, the 3PRS parallel manipulator is a lower mobility mechanism. Besides the movements along the described degrees of freedom, unexpected movements also appear in those degrees of freedom where there was supposed to be no movement. Those unexpected movements are parasitic motions. For the configuration where the three limbs are placed at 120º from each other, parasitic motions appear along X- and Y-axes and about Z-axis.
As shown in the pictures bellow, we have studied the 3PRS for two possible configurations of the prismatic joints – for horizontal and vertical orientation.
[ezcol_1half] [ezcol_1half]
[ezcol_1half]
