
Name of the project: Modular design of reconfigurable parallel manipulators with variable topology (MoMaR)
Reference: DPI2015-67626-P
Funding: Ministerio de Economía y Competitividad
Period: 2016 – 2019
Main researchers: Víctor Petuya & Alfonso Hernández
Participating researchers: Enrique Amezua, Erik Macho & Mónica Urizar

Traditionally, the design of robotic systems has focused on achieving robust and efficient models, optimized for a specific task. However, at the end of the last century, a novel idea started to grow up which consisted in designing machines and mechanisms capable of carrying out several tasks, thus offering higher flexibility and versatility. To sum up, the target is to get multioperational systems in such a way that the robots can change their configuration to execute multiple tasks. Nowadays, the technical chance exists to design and install them in several fields such as mounting small series of large components in the aeronautical and eolic field, flexible tasks in packing and folding, deployable antennas and trusses, biomedical and rehabilitation applications, etc.
Bearing this in mind, the main objective of the present project is to develop a methodology for modular design of reconfigurable parallel manipulators with variable topology. In this project the design of parallel manipulators capable of achieving the highest number of motion patterns in their moving platform is proposed, basing on the reconfigurability of 6 degree of freedom manipulators. This reconfiguring ability is accomplished by blocking different actuators of the manipulator. In this way, a simpler machine is obtained from the operative point of view. Because of working with a lower number of actuators in each operation mode the manipulator will have a simpler kinematics and accordingly a faster and more efficient control. The project developments will result in a software tool intended to help the design and analysis of this type of mechanisms. Finally, making the most of the knowledge acquired during this project a prototype of reconfigurable parallel manipulator with high-capacity of reconfigurability will be built.

To carry out this project, the research group is equipped with data acquisition and computation servers belonging to the Mechanical Engineering Department of the UPV/EHU, having also an Interdepartmental Laboratory equipped with a broad range of materials for prototype building and testing.
Within the framework of this project two Doctoral Theses will be developed, one of them being an International Thesis. A grant for a scholar to be joined to the project within the announcement “Contratos predoctorales para la formación de doctores” has been obtained. An educational plan has been established for this scholar in relation with the topics and achievements of this project, from the development of advanced kinematic analysis methodology to the development of the software and the design and fabrication of the prototype.
Four leading companies in R&D (AERNNOVA, GAMESA, IDOM, SENER) have stated their interest in the project results. The results of the project have a clear impact within the H2020 framework in the initiative Factories of the Future, standing out among its main objectives the development of intelligent and versatile fabrication systems in the fields of robotics and mechatronics. The novel approach of the project and the integration into the group of Prof. Corves (RWTH Aachen, Germany) and J.I Ibarreche (AERNNOVA) constitute the starting point for a European proposal leaded by this research group.

- 3-P(3SS)R parallel manipulator prototype and experimental evaluation.
GIM model:

FEM model:

CAD model:
Final prototype:
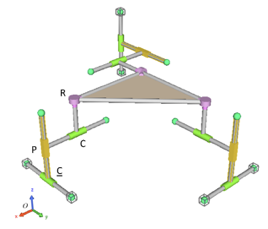
- 3-CPCR parallel manipulator prototype.
GIM model:
CAD model:
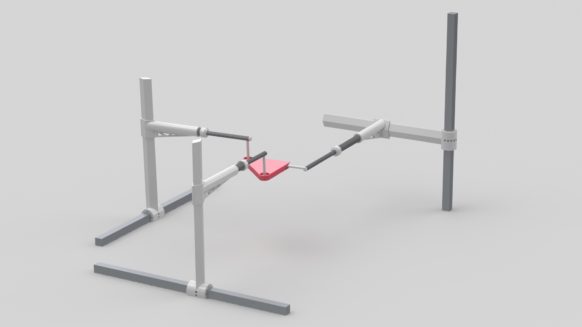
CAD simulation:
In the field of activities related to technological transfer of MoMaR project (DPI2015-677626-P), a Workshop on Reconfigurable Robots will take place in the Faculty of Engineering in Bilbao, during the 8th, 9th and 10th of May 2018. Researchers from the COMPMECH group of UPV/EHU, and also researchers from IGM of RWTH Aachen University and UPT of Timisoara will participate in this workshop, as well as nearby enterprises and technological centers. For further information, check the following document:
Subsequently, some pictures and videos associated to several motion patterns of the prototype of the 3-CPCR are shown:


Proyecto financiado por el Ministerio de Economía y Competitividad y Fondo Europeo de Desarrollo Regional (FEDER), DPI2015-67626-P.
