
Name of the project: Mechatronic analysis of multi-axis agile machines
Reference: EHUA13/30
Funding: University of the Basque Country
Period: 2013 – 2014
Main researcher: Fran Campa
The project entitled Mechatronic analysis of multi-axis agile machines and funded by the University of the Basque Country has the following objectives:
- The development of a procedure for the mechatronic modelling of a parallel kinematic mechanism. This procedure has to include the control algorithm, the location of the sensors, the kinematics and dynamics of the mechanism and the dynamic of the actuators.
- We should be able to select the best control option for a parallel kinematic machine, taking its dynamic, the position of the sensors and its actuators into account.
- The development of a dynamic model of different actuators models so they can be implemented in the mechatronic model of the mechanism. In this way, the effect of the actuators on the dynamic behaviour of the mechanism could also be studied.
- Define indexes to study the controllability of a mechanism and propose improvements such as the redistribution of weight, the relocation of sensors or the the stiffening of the elements.
- The development of trajectory generation methods that allow us to relax the dynamic requirements and introduce velocity, acceleration or jerk requirements due to the dynamic capability of the mechanism and its actuators.
- Apply the previous developments to real prototypes.
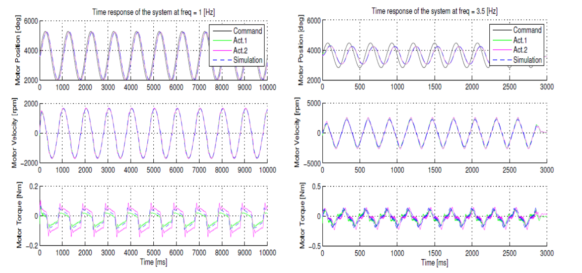
Comparison between the control model and real measurements for the 2PRR mechanism