Diferencia entre revisiones de «DPI2006-15346-C03-03-Resultados-videos-control-manual»
De Grupo de Inteligencia Computacional (GIC)
Sin resumen de edición |
Sin resumen de edición |
||
| Línea 1: | Línea 1: | ||
En estos videos se muestra la idea de qué es lo que se pretende conseguir mediante el control automatizado. En ellos el control de los robots se ha realizado de forma manual por un operador humano. Para la realización ha sido necesario resolver problemas de comunicación multicanal y decidir una forma de enganchar el cable con los robots. | En estos videos se muestra la idea de qué es lo que se pretende conseguir mediante el control automatizado. En ellos el control de los robots se ha realizado de forma manual por un operador humano. Para la realización ha sido necesario resolver problemas de comunicación multicanal y decidir una forma de enganchar el cable con los robots. | ||
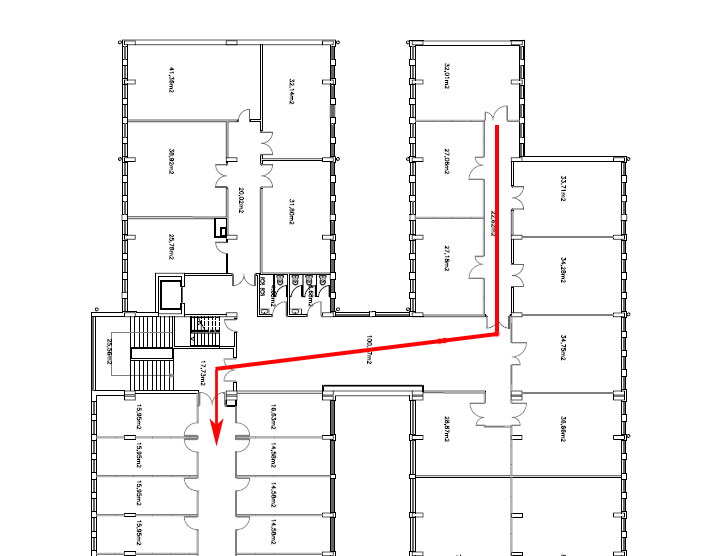
* [[media:PruebaMangueraSR1-1.avi|Paseando un cable con tres SR1]] ([[media:Recorrido_1_sr1.png|Plano]]) | * [[media:PruebaMangueraSR1-1.avi|Paseando un cable con tres SR1]] ([[media:Recorrido_1_sr1.png|Plano del recorrido]]) | ||
* [[media:PruebaMangueraSR1-2.avi|1º paseo con enganche giratorio]] ([[media:Recorrido_1_sr1.png|Plano]]) | * [[media:PruebaMangueraSR1-2.avi|1º paseo con enganche giratorio]] ([[media:Recorrido_1_sr1.png|Plano del recorrido]]) | ||
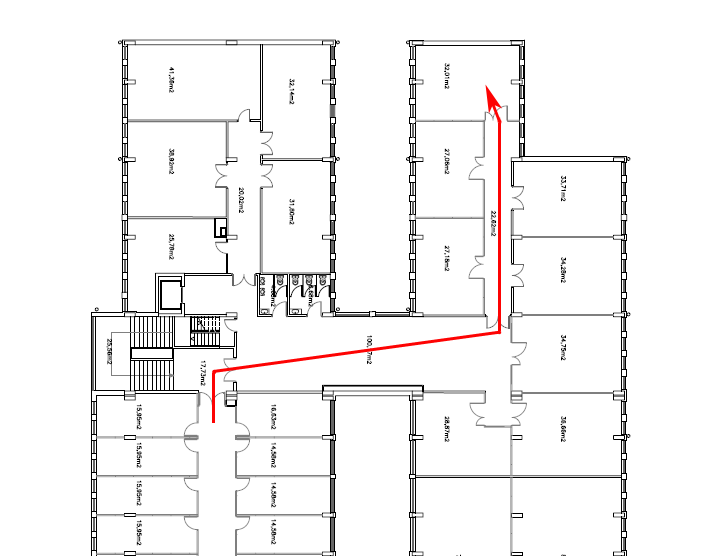
* [[media:PruebaMangueraSR1-3.avi|2º paseo con enganche giratorio]] ([[media:Recorrido_2_sr1.png|Plano]]) | * [[media:PruebaMangueraSR1-3.avi|2º paseo con enganche giratorio]] ([[media:Recorrido_2_sr1.png|Plano del recorrido]]) | ||
* Miniclips: | * Miniclips, versiones aceleradas de corta duración: | ||
** [[media:PruebaMangueraSR1-1 (30s).avi|Vídeo 1 en 30 segundos]] | ** [[media:PruebaMangueraSR1-1 (30s).avi|Vídeo 1 en 30 segundos]] | ||
** [[media:PruebaMangueraSR1-2 (30s).avi|Vídeo 2 en 30 segundos]] | ** [[media:PruebaMangueraSR1-2 (30s).avi|Vídeo 2 en 30 segundos]] | ||
Revisión actual - 19:26 11 sep 2009
En estos videos se muestra la idea de qué es lo que se pretende conseguir mediante el control automatizado. En ellos el control de los robots se ha realizado de forma manual por un operador humano. Para la realización ha sido necesario resolver problemas de comunicación multicanal y decidir una forma de enganchar el cable con los robots.
- Paseando un cable con tres SR1 (Plano del recorrido)
- 1º paseo con enganche giratorio (Plano del recorrido)
- 2º paseo con enganche giratorio (Plano del recorrido)
- Miniclips, versiones aceleradas de corta duración:
{kind=link}
{kind=link}